16 KiB
Exercise description
The task in this exercise is to implement a 5-stage pipelined processor for the RISCV32I instruction set.
For exercise 1 you will build a 5-stage processor which handles one instruction at a time, whereas in exercise 2 your design will handle multiple instructions at a time. This is done by inserting 4 NOP instructions inbetween each source instruction, enabling us to use the same tests and harness for both exercise 1 and 2.
Once you are done with exercise 1, you can up the difficulty by setting nopPad to false and start reading the ex2 guide.
In the project skeleton files (Found here) you can see that a lot of code has already been provided, which can make it difficult to get started. Hopefully this document can help clear up at least some of the confusion. First an overview of what you are designing is presented, followed by a walk-through for getting the most basic instructions to work.
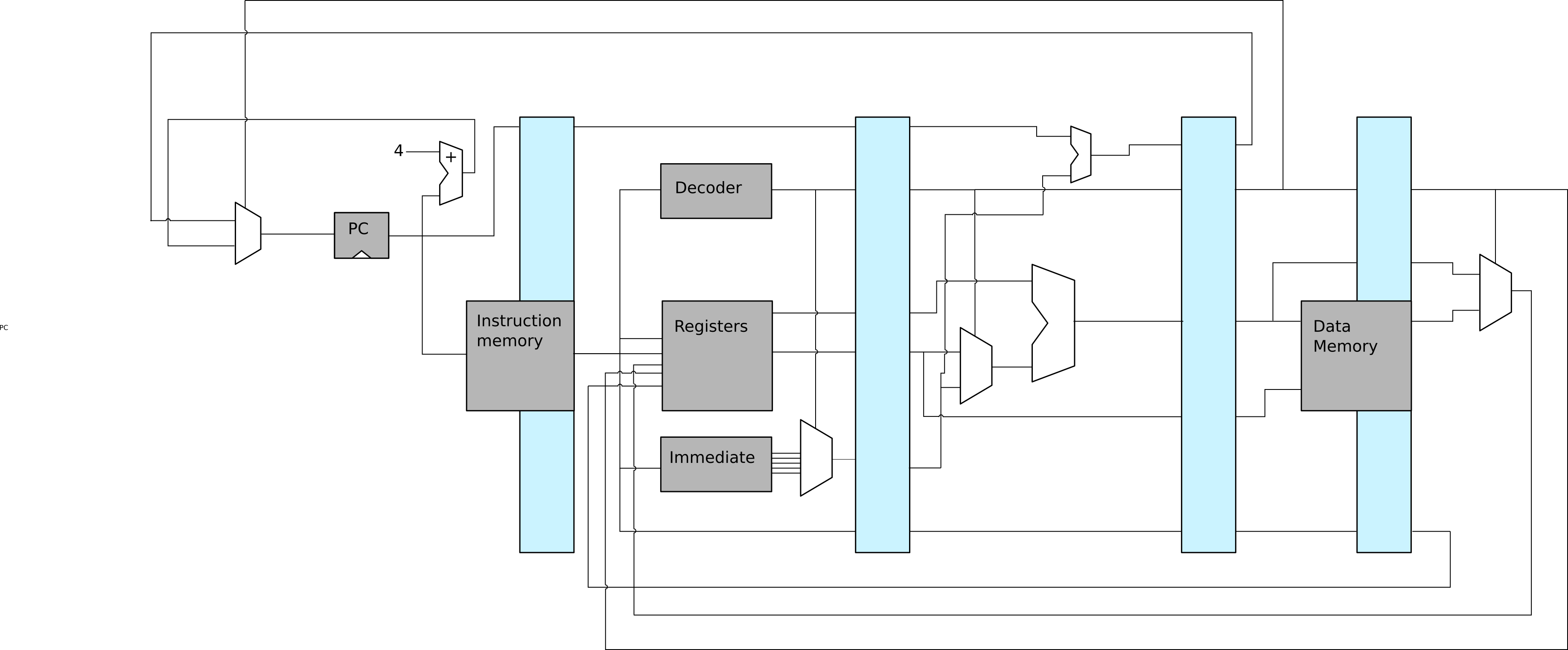
In order to orient yourself you first need a map, thus a high level overview of the processor you're going to design is showed underneath: Keep in mind that this is just a high level sketch, omitting many details as well entire features (for instance branch logic)
Important When you are done, use the provided ./deliver.sh script to pack up the archive. If you're unable to run bash scripts then please ensure that you deliver a zip archive. Not .rar or anything else, just use zip because my grading script knows how to handle that in addition to the one used by deliver.sh named after your username. Nothing more, nothing less, just your username. This archive should be runnable as is, thus you need to include all the necessary files. (I may or may not diff the tests to check if you're screwing with them)
Now that you have an idea of what you're building it is time to take inventory of the files included in the skeleton, and what, if anything should be added.
- /kaholaz/TDT4255/src/commit/f32d674616d52f90a45baa8e220409c333f9726b/src/main/scala/Tile.scala This is the top level module for the system as a whole. This is where the test harness accessses your design, providing the necessary IO. You should not modify this module for other purposes than debugging.
- /kaholaz/TDT4255/src/commit/f32d674616d52f90a45baa8e220409c333f9726b/src/main/scala/CPU.scala This is the top level module for your processor. In this module the various stages and barriers that make up your processor should be declared and wired together. Some of these modules have already been declared in order to wire up the debugging logic for your test harness. This file corresponds to the high-level overview in its entirety. This module is intended to be further fleshed out by you. As you work with this module, try keeping logic to a minimum to help readability. If you end up with a lot of signal select logic, consider moving that to a separate module.
- /kaholaz/TDT4255/src/commit/f32d674616d52f90a45baa8e220409c333f9726b/src/main/scala/IF.scala This is the instruction fetch stage. In this stage instruction fetching should happen, meaning you will have to add logic for handling branches, jumps, and for exercise 2, stalls. The reason this module is already included is that it contains the instruction memory, described next which is heavily coupled to the testing harness. This module is intended to be further fleshed out by you.
- /kaholaz/TDT4255/src/commit/f32d674616d52f90a45baa8e220409c333f9726b/src/main/scala/IMem.scala This module contains the instruction memory for your processor. Upon testing the test harness loads your program into the instruction memory, freeing you from the hassle. You should not modify this module for other purposes than maaaaybe debugging.
- /kaholaz/TDT4255/src/commit/f32d674616d52f90a45baa8e220409c333f9726b/src/main/scala/ID.scala The instruction decode stage. The reason this module is included is that the registers reside here, thus for the test harness to work it must be wired up to the register unit to record its state updates. This module is intended to be further fleshed out by you.
- /kaholaz/TDT4255/src/commit/f32d674616d52f90a45baa8e220409c333f9726b/src/main/scala/Registers.scala Contains the registers for your processor. Note that the zero register is alredy disabled, you do not need to do this yourself. The test harness ensures that all register updates are recorded. You should not modify this module for other purposes than maaaaybe debugging.
- /kaholaz/TDT4255/src/commit/f32d674616d52f90a45baa8e220409c333f9726b/src/main/scala/MEM.scala Like ID and IF, the MEM skeleton module is included so that the test harness can set up and monitor the data memory This module is intended to be further fleshed out by you.
- /kaholaz/TDT4255/src/commit/f32d674616d52f90a45baa8e220409c333f9726b/src/main/scala/DMem.scala Like the registers and Imem, the DMem is already implemented. You should not modify this module for other purposes than maaaaybe debugging.
- /kaholaz/TDT4255/src/commit/f32d674616d52f90a45baa8e220409c333f9726b/src/main/scala/Const.scala Contains helpful constants for decoding, used by the decoder which is provided. This module may be fleshed out further by you if you so choose.
- /kaholaz/TDT4255/src/commit/f32d674616d52f90a45baa8e220409c333f9726b/src/main/scala/Decoder.scala The decoder shows how to conveniently demux the instruction. In the provided ID.scala file a decoder module has already been instantiated. You should flesh it out further. You may find it useful to alter this module, especially in exercise 2. This module should be further fleshed out by you.
- /kaholaz/TDT4255/src/commit/f32d674616d52f90a45baa8e220409c333f9726b/src/main/scala/ToplevelSignals.scala Contains helpful constants. You should add your own constants here when you find the need for them. You are not required to use it at all, but it is very helpful. This module can be further fleshed out by you.
- /kaholaz/TDT4255/src/commit/f32d674616d52f90a45baa8e220409c333f9726b/src/main/scala/SetupSignals.scala You should obviously not modify this file. You may choose to create a similar file for debug signals, modeled on how the test harness is built. You should not modify this module at all.
Tests
In addition to the skeleton files it's useful to take a look at how the tests work. You will not need to alter anything here other than the test manifest, but some of these settings can be quite useful to alter. The main attraction is the test options. By altering the verbosity settings you may change what is output. The settings are:
- printIfSuccessful Enables logging on tests that succeed. You typically want this turned off, at least for the full test runner.
- printErrors Enables logging of errors. You obviously want this one on, at least on the single test.
- printParsedProgram Prints the desugared program. Useful when the test asm contains instructions that needs to be expanded or altered. Unsure what "bnez" means? Turn this setting on and see!
- printVMtrace Enables printing of the VM trace, showing how the ideal machine executes a test
- printVMfinal Enables printing of the final VM state, showing how the registers look after completion. Useful if you want to see what a program returns.
- printMergedTrace Enables printing of a merged trace. With this option enabled you get to see how the VM and your processor executed the program side by side. This setting is extremely helpful to track down where your program goes wrong! This option attempts to synchronize the execution traces as best as it can, however once your processor design derails this becomes impossible, leading to rather nonsensical output. Instructions that were only executed by either VM or Your design is colored red or blue. IF YOU ARE COLOR BLIND YOU SHOULD ALTER THE DISPLAY COLORS!
- nopPadded Set this to false when you're ready to enter the big-boy league
- breakPoints Not implemented. It's there as a teaser, urging you to implement it so I don't have to.
Getting started
In order to make a correct design in a somewhat expedient fashion you need to be methodical!
This means you should have a good idea of how your processor should work before you start writing code. While chisel is more pleasent to work with than other HDLs the bricoleur approach is not recommended.
{kind=link}
My recommended approach is therefore to create an RTL sketch of your processor design. Start with an overall sketch showing all the components, then drill down. In your sketch you will eventually add a box for registers, IMEM and DMEM, which should make it clear how the already finished modules fit into the grander design, making the skeleton-code less mysterious.
To give you an idea of how a drill down looks like, here is my sketch of the ID stage:
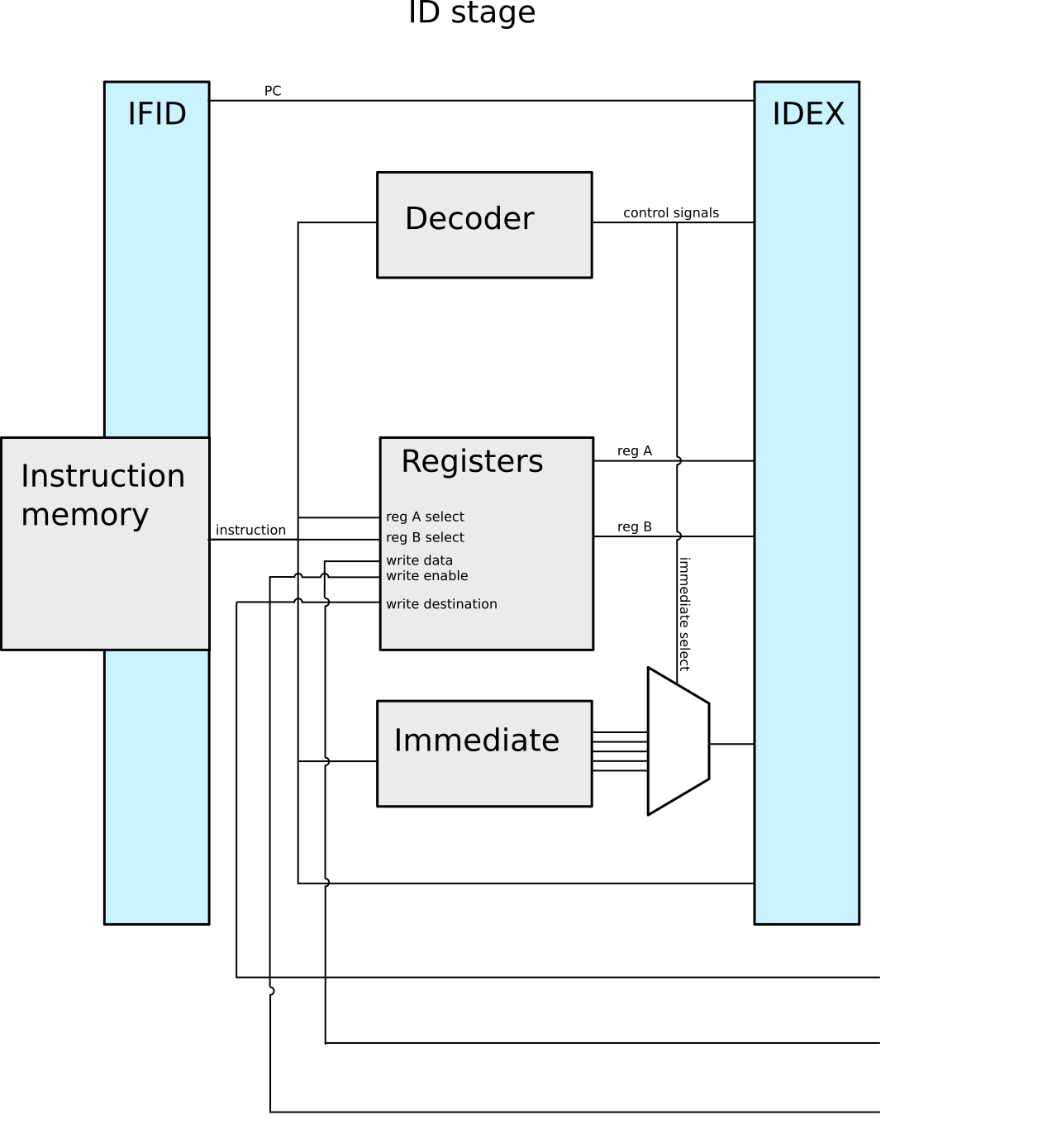
I would generally advice to do these on paper, but don't half-ass them.
Adding numbers
In order to get started designing your processor the following steps guide you to implementing the necessary functionality for adding two integers.
Info is progressively being omitted in the latter steps in order to not bog you down
in repeated details. After all brevity is ~the soul of~ wit
Step 0
In order to verify that the project is set up properly, open sbt in your project root
by typing ./sbt.sh (or simply sbt if you already use scala).
sbt, which stands for scala build tool will provide you with a repl where you can
compile and test your code.
The initial run will take quite a while to boot as all the necessary stuff is downloaded.
Step ¼:
In your console, type compile to verify that everything compiles correctly.
Step ½:
In your console, type test to verify that the tests run, and that chisel can correctly
build your design.
This command will unleash the full battery of tests on you.
Step ¾:
In your console, type testOnly FiveStage.SingleTest to run only the tests that you
have defined in the test manifest (currently set to forward2.s).
As you will first implement addition you should change this to the add immediate test.
Luckily you do not have to deal with file paths, simply changing forward2.s to
addi.s suffices.
Ensure that the addi test is run by repeating the testOnly FiveStage.SingleTest
command.
Step 1:
In order to execute instructions your processor must be able to fetch them.
In /kaholaz/TDT4255/src/commit/f32d674616d52f90a45baa8e220409c333f9726b/src/test/main/IF.scala you can see that the IMEM module is already set to fetch
the current program counter address (line 41), however since the current PC is stuck
at 0 it will fetch the same instruction over and over. Rectify this by commenting in
// PC := PC + 4.U at line 48.
You can now verify that your design fetches new instructions each cycle by running
the test as in the previous step.
Step 2:
Next, the instruction must be forwarded to the ID stage, so you will need to add the instruction to the io interface of the IF module as an output signal. In /kaholaz/TDT4255/src/commit/f32d674616d52f90a45baa8e220409c333f9726b/src/test/main/IF.scala at line 21 you can see how the program counter is already defined as an output. You should do the same with the instruction signal.
Step 3:
As you defined the instruction as an output for your IF module, declare it as an input in your ID module (/kaholaz/TDT4255/src/commit/f32d674616d52f90a45baa8e220409c333f9726b/src/test/main/ID.scala line 21).
Next you need to ensure that the registers and decoder gets the relevant data from the instruction.
This is made more convenient by the fact that Instruction is a class, allowing you
to access methods defined on it.
Keep in mind that it is only a class during compile and build time, it will be
indistinguishable from a regular UInt(32.W) in your finished circuit.
The methods can be accessed like this:
// Drive funct6 of myModule with the 26th to 31st bit of instruction
myModule.io.funct6 := io.instruction.funct6Step 4:
Your IF should now have an instruction as an OUTPUT, and your ID as an INPUT, however they are not connected. This must be done in the CPU class where both the ID and IF are instantiated. In the overview sketch you probably noticed the barriers between IF and ID. In accordance with the overview, it is incorrect to directly connect the two modules, instead you must connect them using a barrier. A barrier is responsible for keeping a value inbetween cycles, facilitating pipelining. There is however one complicating matter: It takes a cycle to get the instruction from the instruction memory, thus we don't want to delay it in the barrier!
In order to make code readable I suggest adding a new file for your barriers, containing four different modules for the barriers your design will need.
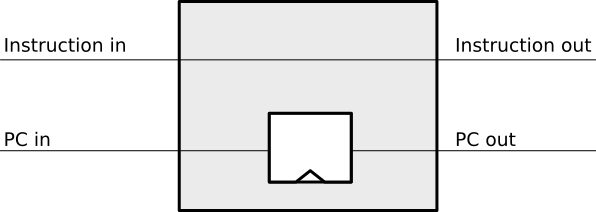
Start with implementing your IF barrier module, which should contain the following:
- An input and output for PC where the output is delayed by a single cycle.
- An input and output for instruction where the output is wired directly to the input with no delay.
The sketch for your barrier looks like this
Step 4½:
You can now verify that the correct control signals are produced. Using printf, ensure that:
- The program counter is increasing in increments of 4
- The instruction in ID is as expected
- The decoder output is as expected
- The correct operands are fetched from the registers
Keep in mind that printf might not always be cycle accurate, the point is to ensure that your processor design at least does something! In general it is better to use debug signals and println, but for quick and dirty debugging printf is passable.
Step 5:
You will now have to create the EX stage. Use the structure of the IF and ID modules to guide you here. In your EX stage you should have an ALU, preferrable in its own module a la registers in ID. While the ALU is hugely complex, it's very easy to describle in hardware design languages! Using the same approach as in the decoder should be sufficient:
val ALUopMap = Array(
ADD -> (io.op1 + io.op2),
SUB -> (io.op1 - io.op2),
...
)
// MuxLookup API: https://github.com/freechipsproject/chisel3/wiki/Muxes-and-Input-Selection#muxlookup
io.aluResult := MuxLookup(io.aluOp, 0.U(32.W), ALUopMap)As with the ID stage, you will need a barrier between ID and EX stage. In this case, as the overview sketch indicates, all values should be delayed one cycle.
When you have finished the barrier, instantiate it and wire ID and EX together with the barrier in the same fashion as IF and ID. You don't need to add every single signal for your barrier, rather you should add them as they become needed.
Step 6:
Your MEM stage does very little when an ADDI instruction is executed, so implementing it should be easy. All you have to do is forward signals.
From the overview sketch you can see that the same trick used in the IF/ID barrier is utilized here, bypassing the data memory read value since it is already delayed by a cycle.
Step 7:
You now need to actually write the result back to your register bank. This should be handled at the CPU level. If you sketched your processor already you probably made sure to keep track of the control signals for the instruction currently in WB, so writing to the correct register address should be easy for you ;)
If you ended up driving the register write address with the instruction from IF you should take a moment to reflect on why that was the wrong choice.
Step 8:
Ensure that the simplest addi test works, and give yourself a pat on the back! You've just found the corner pieces of the puzzle, so filling in the rest is "simply" being methodical.
Delivery
Once you are done simply run the deliver.sh script to get an archive.